A novel low-cost open-source SGRT system for H&N radiotherapy
OC-0934
Abstract
A novel low-cost open-source SGRT system for H&N radiotherapy
Authors: Youssef Ben Bouchta1, Mark Gardner1, Paul Keall1
1The University of Sydney, Image X Institute, Eveleigh, Australia
Show Affiliations
Hide Affiliations
Purpose or Objective
Current H&N radiotherapy relies on immobilisation masks which cause claustrophobia in up to 50% of patients and can cause severe anxiety and treatment disruption in some patients. Surface-guided radiotherapy (SGRT) has the potential to replace immobilisation masks in H&N radiotherapy. However, doing so would require improving the accuracy of SGRT when tracking non-rigid motion and developing an SGRT system with a field-of-view that is not obstructed by gantry rotation or the deployment of on-bord imagers. In this work, we present the Remove the Mask surface imaging system, a proof-of-concept low-cost couch-mounted SGRT system for H&N radiotherapy and SpyGRT, an open-source SGRT software.
Material and Methods
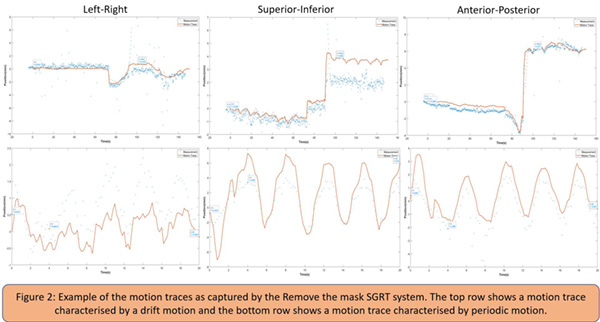
The Remove the Mask surface imaging system uses two Intel RealSense D415 depth cameras positioned above the patient’s chest to capture surface images of the patient’s head and neck. The cameras are calibrated using a calibration phantom which can be positioned using the in-room lasers to align the cameras’ and treatment room’s isocenter. The SpyGRT software controls the cameras, combines images from the cameras and analyses motion in the captured surface images. To test the accuracy of RtMSIS and SpyGRT, we created multiple realistic head motion traces based on volunteer data. The motion traces that we used for testing were made to represent 2 typical motion patterns: a slow drift with a few sudden movements, and periodic motion. The motion traces were produced with a head phantom mounted on a 6 degrees of freedom robot capable of submillimetre accuracy.

Results
The Remove the Mask SGRT system is capable of measuring head and neck motion with an uncertainty of less than 2 mm. The Remove the Mask SGRT system is most accurate for drift motion with a mean error of 0.2 ± 1.0 mm in the left-right (LR) direction, 0.8 ± 0.7 mm in the superior-inferior (SI) direction and 0.5 ± 0.8 mm in the anterior-posterior (AP) direction. For periodic motion, it has an accuracy of -0.6 ± 0.4 mm in the LR direction, 1.0 ± 1.7 mm in the SI direction and 1.0 ± 0.8 mm in the AP direction.
Conclusion
The Remove the Mask surface imaging system is a novel low-cost surface imaging system for SGRT that is not obstructed by gantry rotation or by the deployment of the on-board imagers. SpyGRT is a Python-based open-source SGRT software that is ideally suited for the development of novel SGRT solutions such as that needed to replace immobilisation masks. When the two are used in conjunction to measure H&N motion, they can achieve near submillimetre accuracy.