Automated dynamic trajectory radiotherapy planning using 4pi-IMRT path-finding - proof of concept
Hannes Anton Loebner,
Switzerland
PD-0331
Abstract
Automated dynamic trajectory radiotherapy planning using 4pi-IMRT path-finding - proof of concept
Authors: Hannes Anton Loebner1, Jenny Bertholet1, Silvan Mueller1, Gian Guyer1, Daniel Frei1, Werner Volken1, Olgun Elicin1, Daniel Matthias Aebersold1, Marco Francesco Mario Stampanoni2, Michael Karl Fix1, Peter Manser1, Paul-Henry Mackeprang1
1Inselspital, Bern University Hospital and University of Bern, Division of Medical Radiation Physics and Department of Radiation Oncology, Bern, Switzerland; 2ETH Zuerich and PSI, Institute for Biomedical Engineering, Villigen, Switzerland
Show Affiliations
Hide Affiliations
Purpose or Objective
Dynamic trajectory radiotherapy (DTRT) adds dynamic table and collimator rotation during beam-on to state-of-the-art volumetric modulated arc therapy (VMAT). In this work, we propose a novel automated DTRT treatment planning process (auto-DTRT) which reduces planner bias in treatment planning in terms of DTRT path determination and manual intensity optimization by combining 4pi-IMRT based path-finding and automatic intensity modulation optimization (AIO).
Material and Methods
The auto-DTRT workflow consists of four steps, automated using scripting on a research version of the Eclipse treatment planning system:
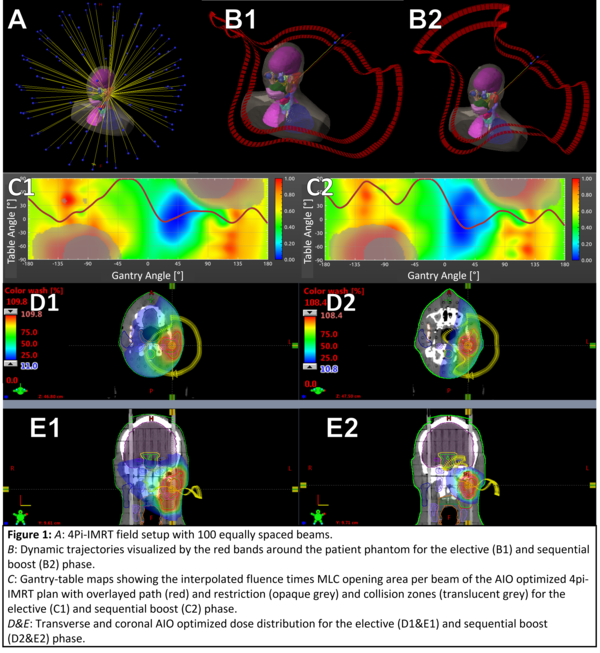
First, a 4pi-IMRT plan is created with 100 fields, set up equidistantly on a sphere around the target (Figure 1A).
Second, the fluence of the 4pi-IMRT plan is optimized using a lexicographic based AIO, which uses a treatment site-specific wish-list of optimization objectives as input. This wish-list is derived from internal clinical guidelines and groups minimal optimization goals for the target and organs-at-risk (OARs).
Third, the AIO-optimized fluence of each beam multiplied by their respective MLC opening area is mapped onto a gantry-table map. On this map, one DTRT path is determined by an A* path-finding algorithm and duplicated with a jaw collimator split (Figure 1B&C). Dynamic collimator rotation is obtained by minimizing the width between opposing MLC leaves.
Fourth, another AIO is performed with the same wish-list, this time for the obtained DTRT paths, followed by the final dose calculation (Figure 1D&E).
The auto-DTRT process is explored for a clinically motivated unilateral postoperative case of Adenoid-Cystic carcinoma in the left parotid gland. Local irradiation was performed with 2 Gy per fraction to 50 Gy (elective) and 66 Gy (sequential boost). The resulting plan was compared to a manually planned VMAT plan of that case. Plan quality is assessed according to clinical goals by a clinician. Computation time is recorded.
Results
A DTRT plan was successfully created using the auto-DTRT workflow.
Computation times for the elective (sequential boost) phase were 10:06 h (1:14 h) for 4pi IMRT AIO, 40 s (40 s) for map generation and path-finding and 24:56 h (6:14 h) for DTRT AIO including final dose calculation. All clinical dose constraints were met and OARs in the transversal plane with the target volume were better spared than VMAT.
Conclusion
For the investigated case, the developed auto-DTRT planning solution is a viable alternative to manual DTRT planning. Auto-DTRT has the potential of increased efficiency through automation. This work was supported by Varian Medical Systems and by grant 20021_185366 of the Swiss National Science Foundation.